

Koło Naukowe TechnoZone zostało zaproszone na Piknik Naukowy „Potęga Umysłu – Radość i Zabawa” zorganizowany w listopadzie przez II Liceum Ogólnokształcące im. ks. Jana Twardowskiego w Dębicy. Zorganizowaliśmy tam pokaz naszych robotów, nad którymi pracujemy już od dwóch miesięcy. W sumie zademonstrowaliśmy 10 konstrukcji. Pięć z nich powstało z zestawów Lego Mindstorms.
Pierwszy to bardzo oryginalna konstrukcja Mateusza Ziobro z kl. 4aT. Jest to gra, która polega na omijaniu samochodzikiem przeszkód na ruchomej drodze. Jest to jedna z autorskich konstrukcja Mateusza, który prezentował ją już kilkakrotnie na różnych ogólnopolskich konkursach i festiwalach.

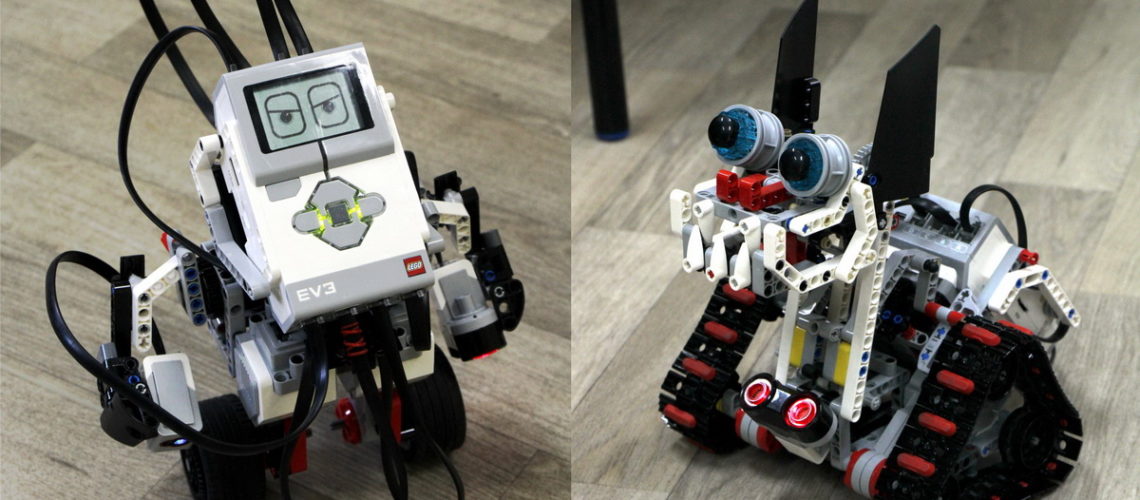
Cztery kolejne roboty skonstruowali uczniowie z kl. 3bT pod kierunkiem p. Mateusza Kukuły. Jednym z nich można było sterować za pomocą smartfona. Następny to robotyczny piesek areagujący na pojawiające się przed nim obiekty. Największy robot potrafił wchodzić po schodach zliczając je przy okazji. I wreszcie niezwykle ciekawy „Pionojazd” – poruszający się tylko na dwóch kołach i utrzymujący równowagę wielozadaniowy robocik. Reagował na cztery barwy. W zależności od rozpoznanego koloru balansował w miejscu lub jeździł w pozycji pionowej. Możliwości tych robotów demonstrował Dawid Szynal i Piotr Longosz.
Pozostałe roboty wykonane zostały przez Jakuba Oleksego i Mateusza Ferfeckiego (kl. 3cT), Wiktora Koźlika i Jakuba Stanulę-Kaczkę (kl. 3bT) oraz Maksymiliana Regnera (kl. 3bTP) i Jacka Zdziebło (kl. 1dT). Ogromnie dużo pracy wymagał robot-samochód „Kamaj” z mikrokomputerem Rasbberry Pi 4 na pokładzie obdarzony sztuczną inteligencją.

Wykorzystując kamerę, bez żadnych innych czujników, uczył się pokonywać trasę z omijaniem losowo ustawionych przeszkód. Z uwagi na poważną awarię kontrolera zarządzania energią, wykorzystywał on zapasowy układ zasilania. Przez to jego mikrokomputer działał na zwolnionych obrotach. Ale nasz główny programista, Kuba Stanula, świetnie zoptymalizował algorytmy uczenia sieci neuronowej, więc „Kamaj” inteligentnie omijał przeszkody na trasie.

Ostatnie cztery roboty oparte były o mikroprocesorową platformę Arduino. Wykorzystując różne czujniki, wykonywały szereg zadań. Owadopodobny „Adrian” za pomocą czterech czułek orientował się w przestrzeni i omijał przeszkody. „Kameleon” zmieniał swój kolor w zależności od koloru podłoża, po którym się poruszał. Dodatkowo wyświetlał rozpoznane kolory na wyświetlaczu. Był sterowany za pomocą pilota telewizyjnego. „Linefollower” poruszał się wzdłuż trasy wytyczonej przez czarną linię. Potrafił pokonywać skrzyżowania i przerwy linii.

Ostatni z robotów, „Multibot”, był wielozadaniowy. Dzięki wykrywaniu granicy obszaru, po którym się poruszał, jeździł tylko wewnątrz zadanej strefy. Poza tym wykrywał przed sobą obiekty i podążał za nimi. Natomiast w drugim trybie potrafił omijać przeszkody. „Multibot” poruszał się autonomicznie, lecz można go było zatrzymać ruchem ręki.

Dodatkowym elementem naszych pokazów było stanowisko z radiostacją, dzięki której można było nawiązać łączność z radioamatorami z kraju i z zagranicy. Zajmował się tym Szymon Hajduk (kl. 1ceT) ze Szkolnego Klubu Łączności SP8KDE.

Pokazy naszych robotów spotkały się z dużym zainteresowaniem tak dzieci, jak i dorosłych. Zwiedzający mogli nie tylko oglądać, ale również sterować robotami. Dzieci miały dużo radości eksperymentując i bawiąc się z naszymi robotycznymi zwierzątkami. Dziękujemy II LO w Dębicy za zaproszenie i polecamy się na przyszłość.

